ok. will fix that and check about local and object space.
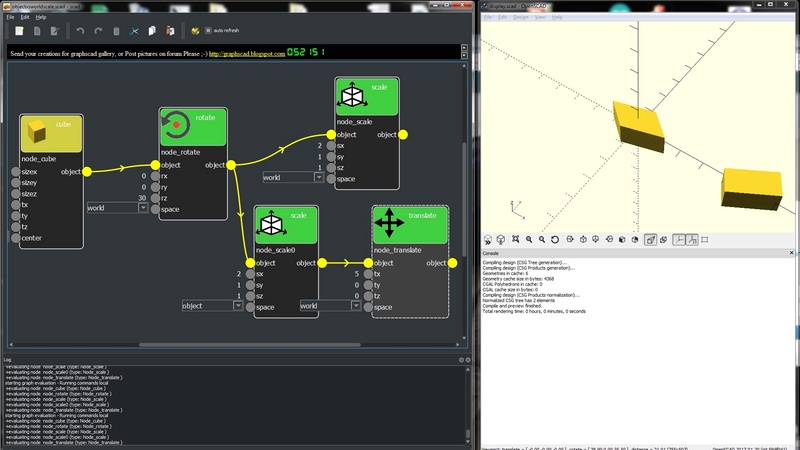
theoricaly, a cube rotated of 45 deg in Z axis and in world space should be scalable in local x axis.
Look at picture : world scale after rotation give different result than scale in object space after rotation.
This is true for each transfom, and very powerfull (in multicopter example, i can 'post' tilt motors with local rotation, without worrying of previous tranforms (rotations of arms around center).
with openscad, all tranforms are always in 'world' space.... and it leads to headache when you have a cascade of previous heterogeneous transforms (rotation and translations).
To be able to have this functionnality, graphscad always generate code to be able to get current transform matrix (4x4) of an object node in the graph.
It allows creation of nodes like 'lookat', that deal with previous transformation to make a correct aiming, even if you object is rotated, and not in center of world.
when you make some joining operations (typicaly a boolean), current matrix of output node will be the matrix of first input object connected to the node.

 resize_node.zip
resize_node.zip